
Bryan Donyanavard
Assistant Professor, San Diego State University
Research Summary
My research focuses on intelligent management of cyber-physical systems. The goal is to provide sufficient performance and efficiency to enable execution of complex workloads on resource-constrained devices. To do so, I deploy decision-making mechanisms to automatically configure systems and applications. Decisions are made by utilizing adaptive policies and self-awareness to balance multiple objectives (e.g., accuracy, energy efficiency, robustness) by monitoring workload behavior and operating conditions at runtime. Topics of interest include computer architecture and software systems, dynamic control, modeling, and multi-criteria decision analysis. I am actively collaborating with Ericsson Research in the context of localization and mapping (LM) applications executing on edge-device networks, and I continue to collaborate with colleagues at UC Irvine and TU Munich.
Projects I am currently involved in are listed below. For more detail, you can see my research vision.
Interests
- Resource-aware autonomy
- End-edge-cloud IoT networks
- Computational self-awareness
Projects
-
MARS consists of a toolchain for creating resource managers that allows users to easily compose models and policies that interact in a hierarchy defined by the granularity of the actuations performed in the system. MARS is implemented and evaluated on top of a real Linux-based platform. Furthermore, MARS also provides an offline simulation infrastructure for fast prototyping of policies and large-scale or long-term policy evaluation.
My contributions to MARS include extensions to support a custom offline simulator, as well as the gem5 architectural simulator. I have used MARS to deploy and evaluate resource management policies for both simulated multicores and real Linux platforms such as the ODROID XU3.
-
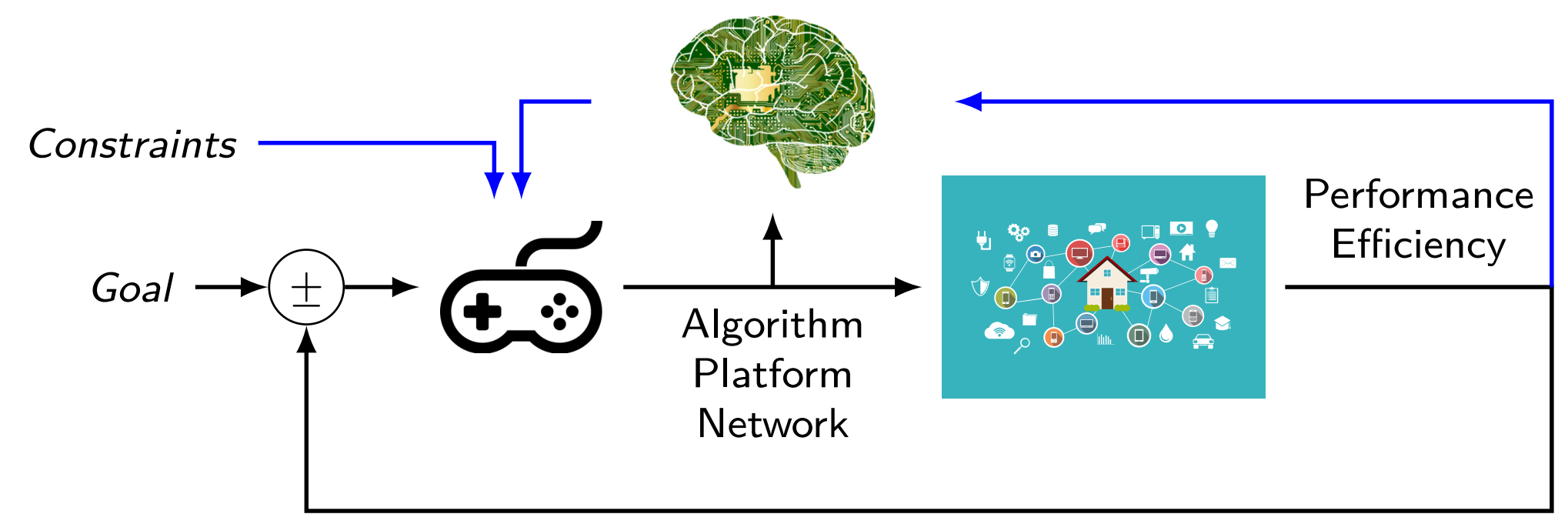
The project exploits self-awareness principles, together with lessons learned from large-scale factories to contain complexity, achieve predictability and manage robust system design. The overall research theme will demonstrate the utility of self-aware IPFs in managing MPSoC complexity, while achieving scalability, predictability, and system efficiency, with the long term goal of supporting autonomous systems as a main application.
My work in this area focuses on providing adaptive resource management using hierarchical control and goal-driven autonomy.
Supervision
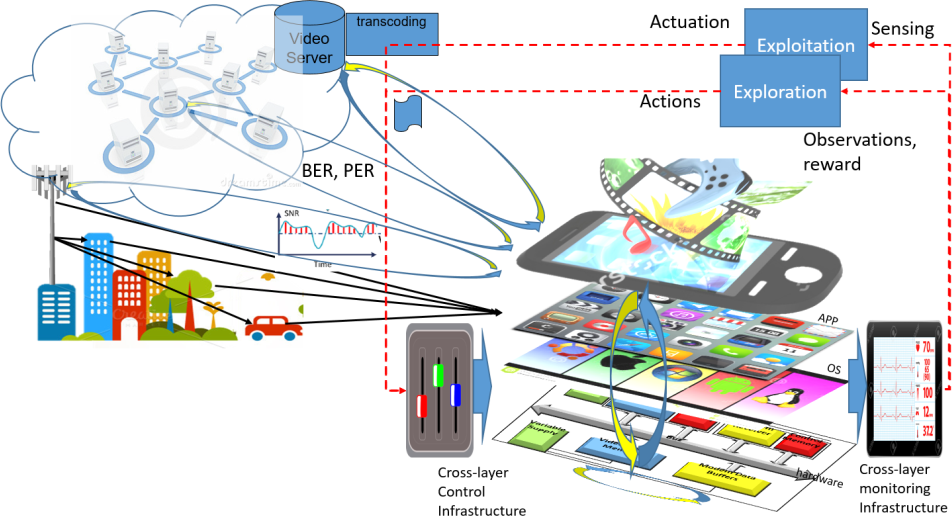
Sandra Hernandez Herrero - KTH/UMadrid - MSc Student - "Design Space Exploration for Visual-Inertial SLAM," with Jose Araujo, 2020/2021